




课程说明
| 课程级别 | 入门级 |
| 培训周期 | 2-3个月 |
| 上课时间 | 全日制 |
| 上课地址 | 河北省唐山市曹妃甸区曹妃甸职业技术学院 C1 实训楼一层 |
课程简介

工业机器人现场工程师课程设计紧贴新的行业趋势,聚焦机器人、新信息技术和人工智能等关键领域。培训内容整合了先进的技术如工业机器人、PLC、机器视觉、三维建模和数字孪生,以此培养符合企业需求的高技能人才。结合理论学习和动手实践,课程旨在为自动化相关岗位,如机器人调试、电气自动化、电气和 PLC 工程师等提供充分准备,覆盖了电工基础、编程、元件应用及机器视觉等多重要领域,确保学员具备跨领域的综合技能。
招生对象
招生对象
0 基础 0 经验的小白人员;
想通过学习提升自己的人员;
想要在机器人行业发展的人员;
对机器人有兴趣的人员;
课程特色
工学结合、课岗互通
1企业导师、产业实践
2小班教学、因材施教
3免费复训、资源共享
4
可掌握的核心能力
掌握智能产线控制系统的设计选择、构建、PLC 编程、机器人编程和设备调试等关键技能;
精通常用驱动设备的控制和参数调整技巧;
能针对不同环境进行机器人编程和调试,熟练操作机器人及其工具;
具有对整个生产线的了解,能够独立完成智能产线从设计到调试和生产实施的全过程。
市场价值
·具备较强的编程思维能力,掌握三菱及西门子 PLC 编程及综合应用;
·能够完成常见工业机器人产线项目开发满足自动化企业的机器人项目开发人员标准。
上课方式:脱产学习,周一至周五,早上 8:30 至下午 17:30(实际培训时间可能因法定节日等因素发生变化)
课程内容
《模块:工业机器人技术基础》
第一章 ABB 机器人基础知识
1.1 ABB 机器人操作注意事项
1.2 ABB 机器人本体及其控制柜
1.3 ABB 机器人示教器介绍与使用
1.4 RobotStudio 软件安装/创建工作站
1.5 RobotStudio 软件的使用
1.6 任务一:机器人系统创建以及简单操作
第二章 ABB 机器人坐标系介绍
2.1 坐标系的含义
2.2 机器人坐标系的分类
2.3 工具坐标系
2.4 工件坐标系
2.5 工具手对齐
2.6 任务二:创建工具坐标系以及斜面工件坐标系
第三章 ABB 机器人路径规划
3.1 简单空路径的编程操作
3.2 简单自动路径的编程操作
3.3 机器人目标点的调整及轴参数的配置
3.4 激光切割工业机器人的离线编程
第四章 ABB 机器人运动指令
4.1 ABB 机器人 MOVE AbsJ 指令
4.2 ABB 机器人 MOVEJ 指令
4.3 ABB 机器人 MOVEL 指令
4.4 ABB 机器人 MOVEC 指令
4.5 OFFS 偏移指令
4.6 实现常见图形的运动轨迹
第五章 ABB 机器人简单搬运
5.1 I/O 信号的配置
5.2 FOR 循环指令
5.3 赋值指令
5.4 OFFS 指令在搬运中的使用
5.5 RobotStudio 软件中模拟搬运
5.6 三个方块的简单搬运
第六章 ABB 机器人程序调用
6.1 ABB 机器人输入输出的接线方式
6.2 程序调用指令的建立与使用
6.3 WHILE 指令的使用
6.4 GOTO\LABEL 指令的使用
6.5 IF 语句的使用
6.6 任务六:利用 IF 语句调用子程序实现不同轨迹
第七章 ABB 机器人简单拆垛码垛
7.1 FOR 循环指令嵌套使用
7.2 OFFS 在程序中的应用
7.3 简单的逻辑赋值与运算
7.4 任务七:机器人拆垛码垛
第八章 ABB 机器人校准
8.1 更新转速计数器
8.2 校准参数
8.3 任务八:机器人六轴校准

《第二模块:PLC 控制技术》
第一部分:电工基础
第一章 生产用电安全
第二章 低压电工元件介绍
2.1 低压电工元件 01
2.2 低压电工元件 02
第三章 工具使用
3.1 电工工具介绍
3.2 万用表使用技巧
第四章 典型电路控制
4.1 点动控制电路接线实例
4.2 串联与并联电路
4.3 自锁与互锁电路
4.4 电动机自锁控制电路接线实例
4.5 电动机互锁控制电路接线实例
第五章 三相交流异步电动机基础应用
5.1 三相交流异步电动机基础
5.2 三相交流异步电动机正反转点动控制
5.3 三相交流异步电动机星三角控制
第六章 传感器技术应用
6.1 传感器技术介绍
6.2 传感器应用接线介绍
第七章 气动元件应用
7.1 常用气动元件介绍
7.2 气动元件控制应用
7.3 传感器与电磁阀控制应用实例
第八章 变频器技术应用
8.1 变频器介绍
8.2 变频器面板控制电动机
8.3 变频器端子控制电动机正反转
8.4 变频器变位器调速控制电动机
8.5 变频器端子控制电动机多段速
第二部分:西门子 PLC
第一章 西门子 S7-1200 硬件介绍及选型
1.1 课程导读
1.2 西门子家族介绍
1.3 PLC 扩展模块的介绍
1.4 PLC 指示灯的介绍及存储卡的作用
第二章 TIA Portal 博途软件的安装及使用介绍
2.1 TIA 博途软件安装及
2.2 建立一个新工程,TIA 博途软件的使用介绍
2.3 设置 PLC 的 IP 地址、程序下载及程序监控
2.4 程序上载、PLC 变量表修改、输入信号强制表
2.5 TIA 博途软件的程序输入及注释等常用功能介绍
2.6 S7-1200 程序块的密码设定及密码
2.7 S7-1200 系列 PLC 的整机密码保护及
2.8 模拟器的使用
第三章 西门子 S7-1200 硬件安装与接线
3.1 章节导读及 S7-1200 输入端子说明
3.2 三线制的 PNP 型和 NPN 传感器接法
3.3 S7-1200 输出信号的类别及接线
第四章 位逻辑控制
4.1 PLC 的扫描执行过程和输出映像介绍
4.2 常开、常闭、赋值、置位、复位指令
4.3 程序里面的双线圈问题说明
4.4 中继电器器 M 及解决双线圈冲突的办法
4.5 置位指令 S、复位指令 R 的应用和线圈的区别
4.6 区域置位(SET_BF)和区域复位(RESET_BF)
4.7 上升沿脉冲|P|和下降沿脉冲|N|的应用
4.8.1 案例讲解:三色灯闪烁实验
4.8.2 案例讲解:新建工程及 IO 点确认
4.8.3 案例讲解:程序编写和调试
第五章 定时器及计数器的应用及案例讲解
5.1 接通延时定时器 TON 详解
5.2 例 1:启动延时关断电路
5.3 例 2:启动延时接通电路
5.4 例 3:关断延时电路
5.5 例 4:跑步机的跑步时间检测程序
5.6 计数器及应用
5.7 例 5:带有定时功能的四组抢答器
5.8 例 7:停车场的空车位数-程序编写与调试
5.9 器应用知识补充
5.10 第一阶段学习总结
第六章 逻辑控制进阶学习及知识补充
6.1 PLC 扫描三个步骤及程序执行过程分析
6.2.1 位逻辑补充知识 1:取反指令-|NOT|-及赋值取反指令-(/)-
6.2.2 位逻辑补充知识 2:置位复位触发器 SR 和复位置位触发器 RS
6.3.1 上升下降沿补充知识 2:上升沿置位-(P)-和下降沿置位-(N)-指令
6.3.2 上升下降沿补充知识 3:扫描 RLO 上升沿及下降沿指令 P_TRIG 和 N_TRIG
6.3.3 上升下降沿补充知识 4:上升沿及下降沿检测指令 R_TRIG 和 F_TRIG
6.4.1 定时器补充知识 1:生成脉冲指令 TP
6.4.2 定时器补充知识 2:关断延时定时器 TOF
6.4.3 定时器补充知识 3:时间累加器 TONR
6.4.4 定时器补充知识 4:线圈型脉冲定时器-(TP)-的使用方法
6.4.5 定时器补充知识 5:线圈型定时器-(TON)-、-(TOF)-、-(TONR)-的应用
6.4.6 定时器补充知识 8:定时器复位指令-(RT)-的应用
6.4.7 定时器补充知识 9:更改定时器设定值指令-(PT)-的应用
6.5.1 计数器补充知识 1:减计数 CTD
6.5.2 计数器补充知识 2:增减计数 CTUD
第七章 FB 及 FC 子程序调用
7.1 结构化编程的概念及博途子程序建立 FC、FB 说明
7.2 子程序调用案例 1:工艺分析及建立子程序
7.3 子程序调用案例 1-程序编写
7.4 子程序调用案例 1-程序调试
7.5 FC(函数)的参数传送与应用
7.6 FB(函数块)和 FC(函数)的区别及应用场景
7.7 子程序内容小结
第八章 数据存储基础
8.1 数据在 PLC 里的存储及各进制数的表现方式
8.2 二进制转十进制
8.3 十进制转二进制
8.4 二进制和十六进制之间的转换
8.5 S7-1200 的数据结构
8.6 DB 数据块的建立及数据类型的讲解
第九章 传送指令
9.1 传送指令 MOVE 的应用
9.2 块传送指令 MOVE_BLK
9.3 块填充指令 FILL_BLK
9.4 数据交换指令 SWAP
第十章 算术运算和转换指令
10.1 加法指令 ADD 和减法指令 SUB 在博途里的应用
10.2 乘法指令 MUL 和除法指令 DIV 在博途里的应用
10.3 求余数指令 MOD
10.4 自加 INC、自减 DEC
10.5 计算指令 ABS
10.6 计算平方指令 SQR 和平方根指令 SQRT
10.7 应用案例一:比例运算 Y=KX,计算现场压力
第十一章 比较指令综合应用
11.1 比较指令 CMP ==、<>、>、<、>=、<=应用详解
11.2 值在范围内 IN_Range 和值超出范围 OUT_Range 指令
11.3 浮点数有效性检查-OK-和-NOT_OK-指令
11.4 例 1:使用自加和比较指令计数器功能
11.5 例 2、使用自加、自减和比较指令完成小灯闪烁次数的控制
11.6 例 3、I0.0 计数,I0.1 启动,停车场的空车位计数-程序编写
第十二章 移位指令
12.1 左移指令 SHL 和右移指令 SHR
12.2 循环左移指令 ROL 和循环右移指令 ROR 详解
第十三章 中断调用
13.1 组织块 OB 及中断子的概念
13.2 中断子程序类型说明及中断优先级列表
13.3 S7-1200 的外部端子中断组态及调用
第十四章 模拟量
14.1 模拟量的概念及恒压供水、温度控制模型
14.2 S7-1200 的模拟量扩展方式及选型
14.3 S7-1200 通信模块 CM1241 的接线及组态
14.4 扩展模块 S M1223、S M1234 的接线及组态
14.5 应用:模拟量控制汇川变频器
第十五章 步进及伺服定位
15.1 脉冲定位及应用场合
15.2 S7-1200 的手动定位控制
15.3 MC_Power、MC_MoveJog、MC_Reset 指令详解
15.4 原点回归设定及原点回归指令 MC-Home 讲解
15.5 正向原点回归实验
15.6 负向原点回归实验
15.7 被动回原点及其它几种回归模式
15.8 相对定位指令 MC_MoveRelative
15.9 定位指令 MC_MoveAbsolute
15.10 阅读伺服手册手册的步骤及方法
15.11 汇川 IS620P 系列伺服各管脚接线说明
15.12 S7-1200 和汇川 IS620P 系列伺服接线
15.12 汇川 IS620P 系列伺服参数设定
15.13 伺服的点动、原点回归、相对及定位
15.14 轴速度控制指令 MC_MoveVelocity 和轴停止 MC_Halt
15.15 轴参数读取指令 MC_ReadParam 和写入指令 MC_WriteParam
15.16 定位控制小结
第十六章 S7-1200 通信控制
16.1 S7-1200 的以太网创建及组态
16.2 远程站点写入 PUT 指令的组态和说明
16.3 远程站点读取 GET 指令的编写和演示
16.4 ModBus 通信的概念及 S7-1200 通信步骤
16.5 S7-1200 通信模块介绍及硬件接线
16.6 S7-1200 Modbus 组态及 Modbus_Comm_Load、Modbus_Master 指令讲解
16.7 S7-1200 和汇川变频器通信(启停变频器)-接线及变频器参数设定
16.8 S71200 和汇川变频器通信(启停变频器)-程序编写及调试
16.9 S7-1200 和汇川变频器通信(启停、改变频率、读取频率)-程序编写及调试
16.10 PLC 和机器人的 Socket 通讯
16.11 Modbus TCP 的概念和连接机制
16.12 ModBus TCP 客户端和服务器 CONNNECT 参数说明
16.13 ModBus TCP 通信指令 MB_CLIENT 和 MB_SERVER
16.14 例:两台 PLC 通过 ModBus TCP 进行数据交换-程序编写
16.15 例:两台 PLC 通过 ModBus TCP 进行数据交换-程序调试
第三部分:三菱 PLC FX3U
第一章 电气自动化基础
1.1-PLC 的由来和概念
1.2-PLC 的分类
1.3-PLC 控制系统的组成
1.4-PLC 的工作原理
1.5-电气控制的三个组成部分
1.6-目前主流的 PLC 品牌
1.7-PLC 的应用领域
第二章 三菱 PLC 及硬件接线
2.1-三菱 PLC 家族介绍
2.2-三菱 FX3 系列 PLC 介绍及选型
2.3-三菱 FX3 系列扩展模块选型
2.4-FX3U 各部分指示说明
2.5-FX3U 输入端子信号说明
2.6-FX3U 的漏型输入接法
2.7-FX3U 的源型输入接法
2.8-使用外部电源的漏型输入接法
2.9-三菱 FX3U 输出信号的类型
2.10-三菱 FX3U 输出信号接线
第三章 GX-Work2 软件应用
3.1-GX-Work2 软件安装
3.2-串口下载线驱动安装、通信设置及程序上下载
3.3-梯形图指令的输入方式以及常用的工具
3.4-软件里几种常用的注释方式
3.5-常用快捷键讲解
3.6-打开和保存其它版本的程序
3.7-PLC 密码设置
3.8-PLC 密码更改-解除-取消
3.9-模拟器的使用
第四章 位逻辑控制
4.1-PLC 的运行执行过程及输入输出映像
4.2-三菱 FX 系列 PLC 的 IO 地址分配规则
4.3-常开,常闭,线圈的应用说明
4.4-例 1:自锁电路
4.5-例 2:双按钮启停电路
4.6-PLC 的扫描过程及扫描三步骤
4.7-双线圈冲突及解决办法
4.8-置位指令 SET 和复位指令 RST 应用
4.9-置位指令 SET 和线圈的区别
4.10-区域复位指令 ZRST
4.11-单触点上升沿脉冲和下降沿脉冲
4.12-运算结果上升沿 MEP 及下降沿 MEF
4.13-上升沿输出 PLS 和下降沿输出 PLF
4.14-运算结果取反 INV 指令
4.15.1-案例 1:控制两台电机(水泵)-工艺分析
4.15.2-案例 1:控制两台电机(水泵) )-分配 IO 点及系统选型
4.15.3-案例 1:控制两台电机(水泵)-主回路图纸接线
4.15.4-案例 1:控制两台电机(水泵)-继电器回路图纸接线
4.15.5-案例 1:控制两台电机(水泵)-PLC 信号接线
4.15.6-案例 1:控制两台电机(水泵)-电机单独和联动控制程序
4.15.7-案例 1:控制两台电机(水泵)-警报和急停功能及程序注释
第五章 定器应用
5.1-定时器的概念和特性
5.2-累计型定时器
5.3-例 1:启动延时关断电路
5.4-例 2:延时启动电路
5.5-例 3:延时关断电路
5.6-闪烁电路
第六章 计数器应用
6.1-计数器概念及分类
6.2-16 位增计数器应用
6.3-32 位增减计数器应用
6.4-断电保持型计数器及保持区域设定
6.5-例 1:闪烁计数停止电路
6.6.1-案例 2:顺序闪烁电路-程序编写
6.6.2-案例 2:顺序闪烁电路-程序调试
6.7.1-案例 3:工作台自动前进—退回控制-工艺分析及 IO 分配
6.7.2-案例 3:电机驱动回路硬件接线
6.7.3-案例 3:控制回路图纸绘制及硬件接线
6.7.4-案例 3:输入输出信号确认
6.7.5-程序编写
6.7.6-程序调试
第七章 主控指令 MC、MCR
7.1-主控指令 MC 和 MCR
7.2-主控的嵌套使用
7.3-主控的嵌套使用
7.4-案例:使用主控指令分别调用 3 个功能
第八章 顺序控制及 SFC
8.1-顺控指令 STL 和 RET 的调用
8.2-顺控指令编写时注意的要求
8.3-顺序控制应用案例 1
8.4-使用中间继电器完成顺序控制编程
8.5-把案例 1 更改成顺控的中间继电器方式
8.6-SFC 的编程步骤和案例演示
8.7-使用 SFC 的方式完成案例 1 控制
8.8-SFC 的选择分支
8.9-SFC 的并行分支
8.10-顺序控制小结
第九章 PLC 编程的方法和架构
9.1-FX 系列常用的特殊辅助中间继电器
9.2-自动控制系统的常用功能和 PLC 编程的架构
9.3-案例一:机械手控制系统-工艺分析及手动演示
9.4-案例一:机械手控制系统-图纸设计和硬件接线
9.5-案例一:机械手控制系统-程序编写
9.6-案例一:机械手控制系统-程序调试
第十章 数据存储基础
10.1-PLC 数据存储方式、FX 系列 PLC 的软元件及断电保持设定
10.2-二进制、十进制、十六进制的概念及它们之间的转换
10.3-二进制转十进制
10.4-十进制转二进制(除 2 取余法)
10.5-二进制转十六进制
10.6-位、字节、字、双字之间的关系
10.7-浮点数的二进制表示
10.8-三菱 PLC 常数的表示方式 K、H、E
10.9-Kxy(K4M0)的数据表达方式详解
10.10-字符在 PLC 的表示方式,ASCII 码表
第十一章 数据存储基础
11.1-指令的双字操作数(D)及上升沿触发(P)规则
11.2-整数传送指令 MOV(P)、DMOV(P)和定时器数值传送
11.3-浮点数传送指令 DEMOV(P)
11.4-字符串传送指令 MOV(P)
11.5-块传送指令 BMOV(P)
11.6-数据填充指令 FMOV(P)
11.7-取反传送 CML、数据交换 XCH、高低字节交换指令 SWAP 应用
第十二章 算术运算指令
12.1-整数加减 ADD、SUB 和自加 INC、自减 DEC 指令
12.2-整数乘法 MUL 和除法指令 DIV
12.3-整数转浮点数 FLT 和浮点数转整数 INT 指令
12.4-浮点数加减乘除 DEADD、DESUB、DEMUL、DEDIV
12.5-平方根运算 SQR、DESQR
12.6-应用案例一:比例运算 Y=KX,计算现场压力
12.7-应用案例二:求圆的半径
12.8-应用案例三:抛物线公式运算
12.9-三角函数 DSIN、DCOS、DTAN
12.10-案例 4:根据走的斜线要求,算出 X,Y 走的距离(删除)
第十三章 比较指令
13.1-整数比较指令
13.2-双整数比较指令和应用
13.3-例 1、使用自加和比较指令完成小灯闪烁次数的控制
13.4-使用自减的方式完成例 1 的控制
13.5-例 2、X0 计数,X1 启动,按要求完成控制要求
13.6-浮点数比较指令 DECPM
13.7-浮点数区域比较指令 DEZCP
13.8-例 3、使用 X0、和 X1 按钮来模拟某一个设备压力控制程序
第十四章 移位和循环指令
14.1 位左移 SFTL 和位右移指令 SFTR 应用
14.2-例 1:小灯移位旋转实验
14.3-例 2:视觉缺陷检测系统 (删除)
14.4-数据左移和右移指令 SFL(P)、SFR(P)
14.5-循环指令 ROL、ROR、RCL、RCR
14.6-字左移和字右移指令 WSFL(P)、WSFR(P)
14.7-例 3:小灯移位旋转实验(升级版)
第十五章 子程序
15.1-模块化编程及子程序调用
15.2-例 1:工作台控制-硬件接线和程序架构
15.3-例 1:工作台控制-程序编写
15.4-例 1:工作台控制-程序调试
第十六章 中断及程序控制指令
16.1-中断的概念和示例
16.2-外部输入中断及注意事项
16.3-中断禁止辅助继电器的用法
16.4-定时中断
16.5-刷新指令 REF 应用
16.6-变址寻址 Z 和 V 指针的应用
16.7-变址寄存器 Z 和 V 区别
16.8-For-Next 循环应用于变址寻址
16.9-CJ 跳转指令及程序暂停应用
16.10-例 1:小车运料-程序编写
16.11-例 1:小车运料-程序调试
第十七章 模拟量应用基础
17.1-模拟量的概念及恒压供水模型
17.2-FX3S3G3U 的模拟量扩展方式
17.3-FX3S3G3U 系列模拟量模块选型
17.4-模拟量模块怎么学习
第十八章 模拟量 ADP 适配器
18.1-FX3U ADP 适配器安装
18.2-FX3G BD 板安装
18.3-FX3G-CNV-ADP 扩展板安装
18.4-FX3U-3A-ADP 模块讲解
18.5-例 1:电压实验(电阻分压)
18.6-例 2、两线制电流型压力变送器压力采集
18.7-三线制电压型压力变送器接线
18.8-例 3、根据现场压力控制模拟量输出电压
18.9-FX3U-4AD(4DA)-ADP 模块应用
18.10-热电阻模块 FX3U-4AD-PT(PTW PNK)-ADP 应用
18.11-热电偶模块 FX3U-4AD-TC-ADP 应用
18.12-FX3G-2AD(1DA)-BD 板应用
第十九章 模拟量扩展模块
19.1-FX 系列模块的扩展方式
19.2-模块缓冲区的读写指令 From 和 To
19.3-FX3U 里使用 UnGn 的方法访问模块缓冲区
19.4-FX3U-4AD 详解及电压采集实验
19.5-例 2、FX3U-4AD 对电流型变送器压力采集
19.6-FX3U-4DA 详解及输出实验
19.7-例 3、根据输入模拟量控制输出模拟量
19.8-FX2N-4AD-TC 热电偶温度模块应用
19.9-FX2N-4AD-PT 热电阻温度模块应用
19.10-FX2N-8AD 模拟量模块应用
19.11-FX2N-5A 模拟量混合模块应用
19.12-FX2N-2AD 应用及实验
19.13-FX2N-2DA 应用及实验
第二十章 PID 控制
20.1-PID 运算概念
20.2-PID 指令及 PID 表详解_2000
20.3-比例系数 P,积分时间 I 和微分时间 D 的说明及实验
20.4-PID 自整定-极限循环法详解
20.5-例 2:使用 PID 自整定的方式,调节水温 1
20.6-例 2:使用 PID 自整定的方式,调节水温 2
20.7-PID 自整定-阶跃响应法详解
20.8-例:PID 的开关量控制-固态继电器调节水温 1
20.9-例:PID 的开关量控制-固态继电器调节水温 2
第二十一章 高速计数及编码器
21.1-高速计数器概念及模式介绍
21.2-1 相 1 计数详解及应用
21.3-1 相 2 计数详解及应用
21.4-2 相 2 计数详解及应用
21.5-FX3U(C) AB 相交的 4 倍率计数方式
21.6-编码器应用知识和硬件接线
21.7-例 1:编码器应用示例
21.8-例 2:编码器测速
21.9-高速计数计置位 DHSCS 和复位 DHSCR 指令讲解
21.10-案例 3:使用编码器定位-程序编写
21.11-案例 3:使用编码器定位-程序调试
21.12-区间比较指令 DHSZ
21.13-区间比较指令 DHSZ 的表格比较模式
第二十二章 步进伺服定位
22.1-PLC 脉冲定位概念及应用场合
22.2-步进电机的基本知识和电机出线
22.3-白山步进驱动拨码设定
22.4-雷赛步进驱动拨码设定
22.5-步进和伺服的脉冲接收方式
22.6-白山步进接线
22.7-雷赛步进接线
22.8-高速脉冲输出指令 PLSY 讲解及实验
22.9-带加减速的高速脉冲输出指令 PLSR 讲解及实验
22.10-相对定位指令 DRVI
22.11-定位指令 DRVA
22.12-原点回归指令 ZRN
22.13-控制原点停在 DOG 信号前面的方法
22.14-步进单轴定位案例-程序编写
22.15-步进单轴定位案例-程序调试
22.16-伺服的基础知识
22.17-伺服说明书使用步骤
22.18-MR-J4 伺服和 PLC 的接线
22.19-MR-J4 伺服参数设置
22.20-伺服的相对定位和定位
22.21-带原点搜索功能的原点回归指令 DSZR
22.22-DSZR 的原点搜索功能
22.23-伺服单轴定位案例-程序编写
22.24-伺服单轴定位案例-程序调试
第二十三章 三菱串口通信
23.1-串口通信的概念
23.2-串行接口标准和常用的通信协议
23.3-FX 常用的通信模块和硬件接线
23.4-N-N 网络概念及地址刷新讲解
23.5-N-N 网络的通信设定及应用案例
23.6-N-N 网络使用通道 2 的办法和编程注意事项
23.7-并联网络及数据刷新模式讲解
23.8-并联网络通信设定及应用案例
23.9-RS 指令讲解
23.10-自由口通信设置 D8120
23.11-RS 指令 PLC 和 PLC 通信案例
23.12-使用自由口通信发送报文启停变频器
23.13-Rs2 指令讲解
23.14-三菱 PLC 和三菱变频器专用通信网络和接口概述
23.15-三菱 PLC 和三菱变频器的接线
23.16-三菱变频器通信参数设置
23.17-三菱变频器通信专用指令 IVDR,IVCK,IVRD,IVWR
23.18-案例:使用变频器通信专用指令控制变频器
23.19-变频器参数批量写入指令 IVBWR
第二十四章 Modbus 通信
24.1-Modbus 通信的概念及特点
24.2-Modbus 通信硬件接线
24.3-FX 的 Modbus 通信设置
24.4-Modbus 专用指令 ADPRW 详解
24.5-FX3U 各寄存器对应的 Modbus 地址
24.6-PLC 和 PLC 的 Modbus 通信-位读写
24.7-PLC 和 PLC 的 Modbus 通信-字读写
24.8-ADPRW 的同时读写功能码 H17 的应用
24.9-FX3U 和汇川变频器通信(启停变频器)
24.10-FX3U 和汇川变频器通信(频率设定和读取)
24.11-FX3U 和模拟量采集模块通信-1
24.12-FX3U 和模拟量采集模块通信-2
24.13-FX3U 和模拟量采集模块通信-3
24.14-多台从站的 Modbus 通信案例-从站设定
24.15-多台从站的 Modbus 通信案例-程序编写
24.16-多台从站的 Modbus 通信案例-程序调试
24.17-Modbus 通信的报文格式
24.18-循环冗余校验码 CRC (删除)
24.19-三菱 CRC 指令
24.20-使用 RS 指令发送报文的方式启停变频器
24.21-使用 RS 指令发送报文的方式修改变频器频率
24.22-使用 RS 指令发送报文的方式读取变频器频率
《第三模块:视觉技术应用》
第一章:视觉模块安装调试
1.1 工业视觉系统概述
1.2 工业视觉系统组成
1.3 工业视觉主要参数
1.4 工业视觉典型应用
1.5 安装视觉模块
1.6 调整视觉参数及法兰图像的训练
1.7 测试视觉数据
第二章:工件形状和颜色识别
2.1 相机标定
2.2 颜色识别
2.3 形状识别
2.4 实际尺寸与像素比标定
2.5 工件形状的学习
2.6 获取工件形状及位置数据
2.7 工件颜色的学习
2.8 获取工件颜色数据
第三章:基于视觉识别的工件分拣
3.1 工件识别分拣流程
3.2 工件抓取编程
3.3 工件码垛编程
3.4 工件识别分拣主程序
第四章:相机安全区域设置
4.1 全局区域监控概述
4.2 全局区域监控数据类型
4.3 全局区域监控指令
4.4 创建全局区域监控变量
4.5 设置相机安全区域
《第四模块:三维建模与 CAM 编程技术》
项目一:零件三维建模
1.1 NXCAD 软件概述
1.2 草图绘制工具
1.3 NX CAD 工程创建
1.4 基本草图绘制
1.5 综合草图绘制
1.6 零件工程图识读
1.7 NX CAD 特征建模工具
1.8 零件三维特征建模
项目二:零件 CAM 编程
2.1 加工工艺编制
2.2 NX CAM 软件概述
2.3 刀 具类型及参数
2.4 CAM 环境参数设置
2.5 刀 具类型创建
2.6 零件加工工序编写
2.7 加工
2.8 程序后处理
2.9 零件加工工序
2.10 后处理生成程序
《第五模块:数字孪生技术》
第一章:序列
1.1 电机成品入库
1.2 电机端盖装配
1.3 电机外壳装配
1.4 电机转子装配
第二章:机电一体化
2.1 传感器
2.2 基本机电对象
2.3 信号与信号适配器
2.4 运动副
2.5 执行器
第三章:软件在环虚拟调试
《第六模块:数控加工中心》
任务一: 加工中心基础操作
1.1 加工中心安全操作注意事项
1.2 加工程序导入方法
1.3 FANUC 数控面板操作面板
1.4 加工中心控制面板
1.5 加工中心启动与复位
1.6 加工程序导入
任务二:刀 具管理与对刀
2.1 加工中心刀 具与刀柄
2.2 加工中心刀库
2.3 加工中心坐标系类型
2.4 加工中心对刀方式
2.5 加工中心手动操作
2.6 刀 具的安装
2.7 手动安装刀 具及换刀
2.8 加工中心对刀
任务三: 零件加工试制
3.1 加工辅助功能
3.2 倍率参数
3.3 加工异常复位
3.4 加工主程序设定
3.5 加工程序运行
3.6 程序运行停止及再运行
《第七模块:机器人系统运维》
项目一:工业机器人的安全作业事项
1.1 清楚安全生产的重要性.pptx
1.2 认识和理解安全标志与操作提示
1.3 了解工业机器人适用的工业标准
1.4 工业机器人的安全作业关键事项
项目二: 准备工业机器人的工具
2.1 工业机器人控制柜维护用的工具
2.2 工业机器人本体维护用的工具
项目三: 工业机器人控制柜故障诊断与维护
3.1 工业机器人控制柜的构成
3.2 工业机器人标准型控制柜的周期维护
3.3 工业机器人紧凑型控制柜的周期维护.pptx
3.4 控制柜故障的诊断技巧
3.5 工业机器人控制柜常见故障的诊断
3-6 工业机器人故障代码的查阅技巧
3.7 工业机器人控制柜电路图解析
3.8 工业机器人本体电路图解析
项目四: 工业机器人本体的维护
4.1 IRB14000 机器人本体维护
4.2 关节型工业机器人 IRB120 本体维护
4.3 关节型工业机器人 IRB1200 本体维护
4.4 关节型工业机器人 IRB1410 本体维护
4.5 关节型工业机器人 IRB360 本体维护
4.6 关节型工业机器人 IRB460 本体维护
《第八模块:MES 管理系统的应用》
任务一: 机床上下料编程与调试
1.1 平台组成与布局
1.2 平台通讯框架及网络接口介绍
1.3 机床上下料程序设计
1.4 平台运行前准备
1.5 机床上下料编程与调试
任务二: 生产信息化管理软件概述
2.1 MES 软件概述
2.2 MES 的国内外发展历程
2.3 MES 的设备管理
2.4 MES 系统的设备配置
2.5 MES 的仓位添加
2.6 MES 的设备状态查询
任务三: 零件加工生产管控
3.1 产品 BOM 分析
3.2 订单与物料管理
3.3 MES 系统生产排程
3.4 产品 EBOM 和 PBOM 创建
3.5 生产订单创建和料仓设置
3.6 电机外壳零件加工自动排产
《第九模块:职业规划课程》
职业规划课程由具备丰富经验的就业部经理亲自授课,其讲解方式通俗易懂,将理论与
实践有效结合,确保了课程内容的高实用性。针对每位学员,我们建立了学习档案,并实时
跟踪学习进展,提供的“一 对一”服务,包括课程定制、学习辅导、就业指导和职业
规划,保 障学员就业,持续助力他们争取到更好的工作机会。课程内容主要涵盖以下三
个关键方面,旨在帮助学员顺利入职并迅速适应工作环境:
第一部分:如何选择一家公司
1、机器人相关企业特点
2、各企业特点
3、各类企业人才需求
4、往届学员就业情况分析
第二部分:求职准备
1、求职的准备
2、个人职业定位
3、关于求职
第三部分:面试技巧
1、面试准备
2、
3、面试技巧
第四部分:就业分析
1.不同企业的优点与劣势
2.各类企业的人才需求(本体企业、集成商、应用企业)
3.毕业学员就业情况分析
4.职业生涯规划
5.用人单位信息收集
6.简历撰写——敲门砖
7.常见面试流程介绍
8.HR 常见提问汇总
9.面试常见问题汇总
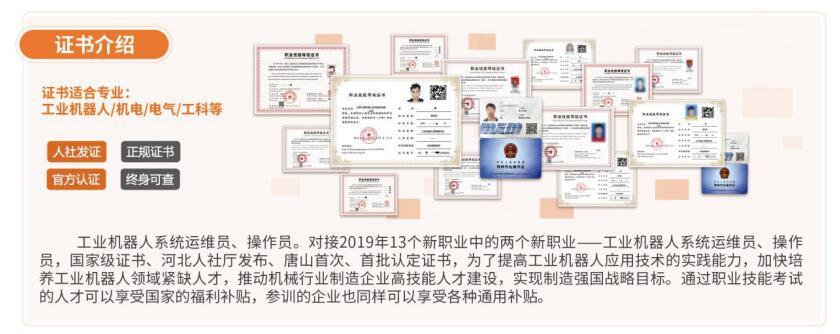
新职业工种及考证介绍
新职业:工业机器人系统运维员、工业机器人系统操作员、人工智能训练师等多种职业
 企业申报科技项目
企业申报科技项目 个人福利
个人福利

课程内容以实际授课为准
温馨提示






